- Produkte
- Kennzeichnung
- Alternative
Position und Winkel beruehrungslos messen
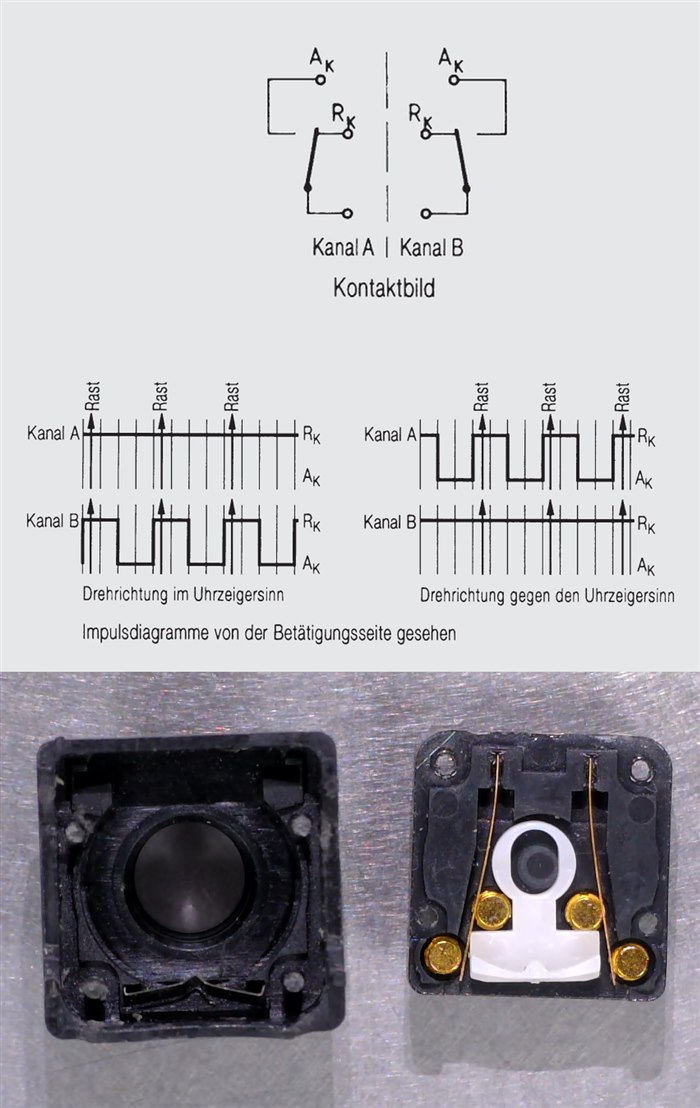
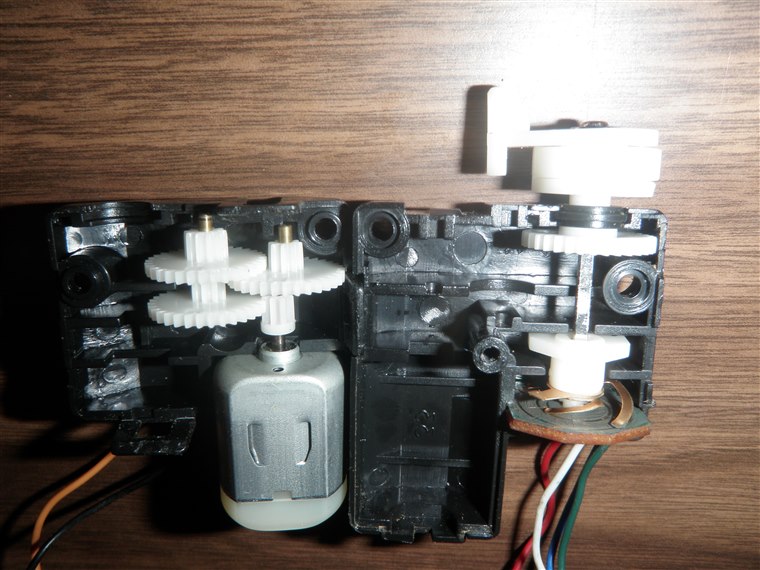
Der Kontakt ist, was versagt. Ein Potentiometer liest eine Position, indem es einen Schleifer über eine Widerstandsbahn zieht, und jede Messung trägt die Bahn ein kleines Stück ab, bis genau dort eine Unterbrechung entsteht, wo das Bauteil die meiste Zeit im Ruhezustand verweilt. Berührungslose Sensorik entfernt den Schleifer und liest stattdessen ein Feld aus. Nichts berührt sich, also verschleißt nichts.
Das Problem verschwindet nicht, es verlagert sich. Ein rotierender Magnet, ein Metallobjekt das sich nähert, eine Flüssigkeit die an einer Elektrode ansteigt: Jedes dieser Systeme koppelt über Geometrie an seinen Sensor, und diese Geometrie ist nun Bestandteil der Messung. Ein Magnet, der einen halben Millimeter versetzt auf der Wellenachse sitzt, verbiegt die Winkelausgabe. Eine Spule, die zu weit von ihrem Ziel montiert ist, verliert Signal, das sie nie zurückgewinnen kann. Eine kapazitive Elektrode mit nachlässiger Masseführung misst einen Pegel, der nicht existiert. Die im Datenblatt angegebene Auflösung wird bei der idealen Ausrichtung erreicht, die der Hersteller selbst gemessen hat, und die Montagelinie ist der Ort, an dem diese Bits gehalten oder verloren werden. Die Wahl des Sensorprinzips richtet sich nach dem Material des beweglichen Teils; die Montage muss danach wie ein Teil der Schaltung entworfen werden, denn das ist sie.
Winkel aus einem Magneten lesen
Alle rotierenden Anwendungen funktionieren nach demselben Prinzip. Ein kleiner Magnet, der diametral und nicht axial magnetisiert ist, sitzt auf der Stirnseite der Welle. Der darunterliegende Chip tastet die Feldrichtung mit einem Array von Sensorelementen ab und berechnet den Winkel aus den Feldkomponenten. Die Ausgabe ist daher vom ersten Einschalten an absolut, ohne Indexsuche, ohne Zählen von einer Ruheposition. Der Magnet ist ein paar Millimeter Neodym, und die diametrale Magnetisierung ist nicht verhandelbar: Eine gewöhnliche axial magnetisierte Scheibe liefert eine völlig falsche Feldgeometrie. Was die Bauelemente voneinander unterscheidet, sind Auflösung, Schnittstelle, Geschwindigkeit und wie gut jedes Modell einen Magneten toleriert, der leicht außerhalb der Sollposition sitzt.
Der AS5600 misst den berührungslosen magnetischen Drehwinkel mit zwölf Bit, also 4096 Positionen pro Umdrehung, und ist als direkter Nachfolger des Potentiometers konzipiert, das er ersetzt. Er spricht I²C und kann wahlweise eine ratiometrische Analogspannung oder PWM ausgeben, sodass Firmware, die für ein Potentiometer geschrieben wurde, auch ohne den Schleifer weiterläuft. Start- und Stoppwinkel lassen sich so programmieren, dass ein partieller mechanischer Schwenkbereich auf den vollen Ausgangsbereich abgebildet wird, was genau der Anwendungsfall für Drehknöpfe und Gimbal-Mechanismen ist, in denen das Bauteil eingesetzt wird. Eine automatische Verstärkungsstufe meldet, ob der Magnet zu nah oder zu weit entfernt ist, eine kostenlose Überprüfung der einzigen mechanischen Variablen, die der Chip selbst nicht korrigieren kann. Zwölf Bit ergeben Schritte von weniger als einem Zehntel Grad, feiner als das Umkehrspiel des Zahnradgetriebes, hinter dem das Bauteil meist sitzt, und ein Watchdog versetzt es in den Niedrigenergiemodus, sobald sich der Magnet nicht mehr bewegt. Die Trägerplatinen dafür sind günstig und weit verbreitet, was den AS5600 zum Standard-Magnetencoder im Bereich kleiner Robotik gemacht hat.
Der AS5048A misst den Absolutwinkel mit hoher Auflösung: vierzehn Bit, 16384 Positionen, je knapp ein Fünfzigstel Grad. Die Ausgabe erfolgt über SPI, PWM dient als Fallback, und die Nullposition wird in ein einmalig programmierbares OTP-Speicher gebrannt, sodass ein Gelenk in beliebiger Ausrichtung montiert und anschließend per Software genullt werden kann. Die zwei zusätzlichen Bits gegenüber dem AS5600 machen einen Unterschied, wenn der Winkel in einen Regelkreis statt auf eine Anzeige geht: ein Robotergelenk, ein Kamera-Gimbal, eine Antennenpositionierung, überall dort, wo die Schleifenverstärkung jedes Zählerrauschen des Sensors als sichtbares Zittern vergrößert. Zwei Exemplare lassen sich auf einem einzigen SPI-Bus hintereinanderschalten und in einer einzigen Transaktion auslesen, und der Arcustangens wird von einer internen CORDIC-Einheit berechnet, die das Hall-Array speist. Dafür stellt das Bauteil höhere Anforderungen an die Magnetpositionierung: Je feiner die Auflösung, desto früher macht sich Exzentrizität als wiederkehrender Fehler bemerkbar, der einmal pro Umdrehung durch den Winkel läuft.
Der MA730 misst den Magnetwinkel bei hoher Drehzahl, und Geschwindigkeit ist der gesamte Charakter dieses Bauteils. Es behält vierzehn Bit Auflösung, während die Welle mit Zehntausenden von Umdrehungen pro Minute dreht, und neben der absoluten SPI-Ausgabe erzeugt es inkrementelle Quadraturausgänge, die klassischen ABZ-Impulse, mit programmierbarer Anzahl pro Umdrehung. Diese zweite Schnittstelle ist der eigentliche Punkt: Ein Motorcontroller erfasst Flanken in dem Moment, in dem sie auftreten, statt ein Register zu pollen und einen Winkel zu lesen, der bereits veraltet ist. Die Impulse pro Umdrehung lassen sich bis zur vollen 14-Bit-Anzahl programmieren, und der Indeximpuls liegt auf einem frei wählbaren Winkel, was dem Bauteil erlaubt, den optischen Encoder zu imitieren, den ein Controller bereits erwartet. Das Filterfenster ist in Stufen einstellbar, der Tausch zwischen Winkelrauschen und Gruppenlaufzeit lässt sich damit an die jeweilige Achse anpassen: mit den kurzen Einstellungen antwortet das Bauteil in Zehnern von Mikrosekunden und lässt die niedrigen Bits tanzen, mit den breiten bleibt die Ausgabe ruhig. Es ist die Wahl, wenn der Winkel die Kommutierung speist und nicht eine Benutzeroberfläche.
Der TLE5012B liefert einem Motor präzises Winkel-Feedback und tastet das Feld anders ab: Giant-Magnetoresistance statt Hall-Platten, wobei Elemente die Feldrichtung anhand ihres vom Winkel zwischen Strom und Magnetisierung abhängigen Widerstands lesen. Das Bauteil kalibriert sich im Betrieb selbst, indem es die Verstärkungs- und Offsetdrift seiner Brücken über die Temperatur gegen Parameter nachführt, die beim Abschlusstest gespeichert wurden. So liegt der 15-Bit-Winkel bereits korrigiert vor, ohne dass der Host nacharbeiten muss. Es wird in vordefinierten Varianten geliefert, deren Sekundärschnittstelle für die jeweilige Aufgabe bereits eingerichtet ist: Inkrementalimpulse, PWM oder Hall-Switch-Emulation, die drei diskrete Kommutierungssensoren ersetzt und dem Firmware-Team eine fertige Schnittstelle übergibt statt einer zu konfigurierenden. Die synchrone Serielle Schnittstelle liefert den Absolutwinkel auf Abruf, und jede Messung wird mit Statusbits ausgeliefert, die ein schwaches Feld oder einen internen Fehler signalisieren, genau die Buchführung, nach der ein Safety-Reviewer namentlich fragt. Das Bauteil ist von Infineon automotive-qualifiziert, und das merkt man: Das Datenblatt liest sich wie ein Sicherheitsdokument, und das Bauteil ist am liebsten an einem Motor verschraubt, der nicht lügen darf, wo sein Rotor gerade ist.
Was eine schnell drehende Welle mit den Zahlen macht
Eine schnell drehende Welle macht den Winkel zu einem beweglichen Ziel, und die Antwort des Sensors ist stets ein wenig veraltet. Der Chip benötigt Zeit zum Abtasten des Feldes, zum Filtern des Ergebnisses, zum Berechnen des Winkels und zum Takten über eine Schnittstelle. All diese Verzögerungen addieren sich zu einer Ausbreitungszeit, die sich direkt in Winkelfehler umrechnet: Bei 10000 rpm durchläuft die Welle 60 Grad pro Millisekunde, sodass eine Gesamtlatenz von hundert Mikrosekunden bedeutet, dass der Controller auf einem Winkel handelt, der sechs Grad veraltet ist. In einem feldorientierten Motorkreis landet dieser Fehler im Drehmomentvektors, und der Motor zahlt dafür mit Wärme und verlorener Ausgangsleistung. Das Filtern sitzt im selben Kompromiss. Ein schmales Filter lässt die niedrigen Bits im Rauschen tanzen, ein breites beruhigt sie und frisst Bandbreite, die der Regelkreis brauchte. Die richtige Einstellung hängt von der Achse ab, weshalb die besseren Bauteile sie programmierbar machen. Die Schnittstelle ist das dritte Element. Ein absolutes Register über einen seriellen Bus zu pollen kostet Dutzende von Mikrosekunden pro Lesezugriff, und die Antwort altert während sie übertragen wird. Inkrementelle Flanken kommen in dem Moment an, in dem der Winkel eine Grenze überschreitet, und kosten nichts zum Parsen, weshalb die Hochgeschwindigkeitsteile die Mühe auf sich nehmen, sie zu erzeugen. Nichts davon zeigt sich auf einer Messbank mit stehender Welle, und alles davon entscheidet, ob der Motor singt oder stottert. Der statische Auflösungskampf zwischen zwölf und vierzehn Bit wird in Marketingmaterial entschieden; der dynamische wird in Mikrosekunden entschieden, und es ist der, den der Motor spürt.
Bei Drehzahl ist die entscheidende Kenngröße in Mikrosekunden gemessen, nicht in Bit.

Position ohne Rotation
Nicht jede Position ist ein Winkel. Eine Taste, die einen Zehntel Millimeter nachgibt, ein Ventilschieber in seiner Bohrung, Kühlmittel das an einer Tankwand hochsteigt: Das sind Verschiebungen, und zwei weitere Feldtypen decken sie ab. Eine als Teil eines Resonanzkreises betriebene Spule sieht ihre Induktivität sinken, wenn ein leitfähiges Ziel näher kommt, weil das Ziel Wirbelströme hostet, die dem Feld entgegenwirken, und die Resonanzfrequenz steigt als Reaktion an. Frequenz messen bedeutet also Abstand messen. Ein Elektrodenpaar sieht seine Kapazität sich verschieben, wenn etwas mit einer anderen Dielektrizitätskonstante den Zwischenraum betritt, Flüssigkeit, ein Fingertip, eine bewegliche Platte, und Femtofarad-Änderungen transportieren die Position. Die Resonanzen liegen im Bereich von einigen Hundert Kilohertz bis wenige Megahertz, bestimmt durch die Spule und den Kondensator daneben.
Der LDC1614 misst induktive Näherung und Verschiebung, indem er diese Resonanzfrequenz mit 28 Bit über vier Kanäle aufliest. Dadurch wird eine auf der Leiterplatte selbst geätzte Kupferspirale zu einem Präzisionspositionssensor ohne Materialkosten. Das Ziel muss nur leitfähig sein: eine Stahlhalterung, eine Aluminiumfahne an einem Mechanismus, die Metallkuppel unter einer versiegelten Taste. Öl, Staub, Tinte und jede nicht leitende Verschmutzung zwischen Spule und Ziel verändern das Messergebnis nicht, weshalb induktive Sensorik das schmutzige Ende der industriellen Positionsmessung dominiert. Im Nahbereich lassen sich Bewegungen im Submikrometerbereich auflösen, und eine zweite Spule als Referenzkanal kompensiert den Temperaturdrift der ersten, da der Kupferwiderstand mit der Wärme wandert, unabhängig davon, ob sich das Ziel bewegt oder nicht. Die Kanäle konvertieren abwechselnd über einen gemeinsamen Kern, und die Stabilität des Referenztakts entscheidet, wie viele der 28 Bit Information tragen statt Jitter. Die Entwicklungsarbeit verlagert sich aus der Stückliste ins Layout, wo der Spulendurchmesser den Messbereich bestimmt und die darunter liegende Massefläche Abstand halten muss.
Der FDC1004 misst kapazitive Position und Füllstand über vier Kanäle mit Femtofarad-Auflösung innerhalb eines 15-Picofarad-Fensters, und seine Abschirmtreiber sind das Merkmal, das ihn außerhalb des Labors nutzbar macht. Eine aktiv getriebene Abschirmelektrode umgibt die Messelektrode auf demselben Potential, sodass die parasitäre Kapazität zu allem hinter dem Sensor wegfällt und der Messbereich dorthin zeigt, wo das Layout ihn hinrichtet. Der charakteristische Trick ist die Füllstandsmessung durch eine Kunststofftankwand: Kupferstreifen auf einer flexiblen Folie außen am Tank, die hohe Dielektrizitätskonstante des Wassers liefert das Signal innen, ohne Anschluss, ohne Schwimmer, ohne abdichtende Dichtung, die versagen könnte. Jeder Kanal misst entweder gegen die Abschirmung oder differenziell gegen eine zweite Elektrode, und ein Offset-Register zieht die Ruhekapazität des Aufbaus aus dem Fenster heraus, sodass der Bereich für das Nutzsignal verwendet wird statt für das Kabel. Für den Tank hält eine Referenzelektrode, die tief genug eingetaucht bleibt, den Einfluss der Temperatur auf die Dielektrizitätskonstante der Flüssigkeit klein. Genauso dient das Bauteil für Näherungs-Wake-up: Eine Hand, die sich einem Panel nähert, verschiebt Pikofarad, bevor sie irgendetwas berührt, und die Abtastrate von einigen Hundert Hertz ist mehr als ausreichend für einen Pegel, der sich nach Minuten ändert.
Die Wahl zwischen beiden ist hauptsächlich eine Frage des Zielmaterials. Ein leitendes bewegliches Teil an einem schmutzigen Ort bevorzugt die Spule; eine Flüssigkeit, eine menschliche Hand oder ein nicht leitendes Teil bevorzugt die Elektrode. Die Fehlermoden kehren sich auf dieselbe Weise um: induktive Sensorik ist gegenüber Schmutz unempfindlich und reagiert empfindlich auf nahes Strukturmetall, kapazitive Sensorik sieht durch Kunststoff und reagiert empfindlich auf leitfähige Schichten, Kondensation und nachlässige Masseführung. Kondensation ist der grausame Fall, ein Feuchtefilm auf der Innenseite einer Abdeckung, der als Phantomberührung ausgelesen wird, bis er trocknet. Die ehrliche Antwort ist manchmal beides: ein induktiver Taster unter einer kapazitiven Wake-up-Oberfläche, jeder deckt den blinden Fleck des anderen ab.
Die Montage ist das eigentliche Datenblatt
Jedes der oben genannten Bauteile gibt seine Präzision bei einer Geometrie an, die es selbst nicht kontrolliert. Die Magnetbauelemente wollen den Magneten innerhalb eines Bruchteils eines Millimeters auf der Rotationsachse zentriert und schwebend in der Höhe, die die Verstärkungsstufe vorgibt. Exzentrizität erzeugt eine einmal-pro-Umdrehung-Fehlerwelle im Winkel, die keine noch so hohe Auflösung beseitigt. Die Spule will ihr Ziel innerhalb von ungefähr einem Spulendurchmesser, da die Empfindlichkeit mit dem Abstand stark abfällt und ein zu weit entferntes Ziel nur Rauschen hinterlässt. Die Elektrode will ihre Feldlinien genau auf dem zu messenden Objekt landen lassen, und jeder Zentimeter unabgeschirmter Leiterbahn fügt parasitäre Kapazität hinzu, die die Femtofarads des Nutzsignals begräbt. Kalibrierung kann den reproduzierbaren Teil einer schlechten Montage kompensieren: einen festen Offset, eine bekannte Kurve. Den Teil, der von Einheit zu Einheit auf der Linie variiert, kann sie nicht kompensieren, weshalb die Toleranzzeichnung den Produktionsausschuss bestimmt, lange bevor die Firmware ein Wort mitreden kann. Der Verstärkungsindikator bei den Magnetbauteilen existiert genau dafür: eine Pass/Fail-Kennzahl, die eine Prüfvorrichtung in einer Sekunde pro Einheit ausliest.
Die Auswahl läuft also rückwärts von der Mechanik. Eine rotierende Welle mit einem Magneten auf der Stirnseite nimmt den AS5600 für Drehknöpfe, den AS5048A wenn ein Regelkreis die Zählimpulse braucht, den MA730 wenn die Welle so schnell dreht, dass Latenz zum Feind wird, und den TLE5012B wenn der Motor das Produkt ist und der Winkel automotive-Anforderungen standhalten muss. Ein gleitendes oder biegendes leitendes Teil nimmt die Spule und den LDC1614; eine Flüssigkeit oder eine sich nähernde Hand nimmt die Elektrode und den FDC1004. Alle sind günstig genug, dass das Erproben zweier Prinzipien am Prototyp weniger kostet als eine Woche Diskussion darüber.
Der Schleifer hat sich abgenutzt, weil er berührt hat. Diese Bauteile halten, weil sie aus der Distanz messen, und der Preis dieser Distanz wird in Millimetern Ausrichtung bezahlt, gehalten über die gesamte Lebensdauer des Produkts.